




机动工业车辆 安全规范 GB 10827—1999
国家质量技术监督局1999—11—23批准 2000—06—01实施
前言
本标准等效采用ISO 3691:1980《机动工业车辆 安全规范》修订GB 10827—1989《机动工业车辆安全规范》。
本标准与国际标准ISO 3691:1980的差异:
——第1章中删除了对“必须”和“应”两个词的解释内容。
——第2章中用GB/T 6104—1985代替ISO 5053—1:1980。用“机动工业车辆的术语、分类和定义按GB/T 6104的规定”代替ISO 3691:1980中第3章的内容。
——第2章和4.2.1中删除了ISO 1214—1。
——第2章和6.1中用ISO 1074:1991代替ISO 1074:1975。
——第2章和6.2中用GB/T 5142—1985代替ISO 3184:1974。
——第2章和6.3中用ISO 5766:1990代替ISO 5766:1978。
——第2章和6.6中增加了ISO 8379:1998。
——第2章和6.7中用ISO 5767:1992代替ISO 5767:1978。
——第2章和第7章中用ISO 6292:1996代替ISO 6292—1:1981和ISO 6500:1980。
——第2章、8.5.1.1和第9章中用GB/T 7593—1987代替ISO 3287:1978。
——第2章和11.1.1.3中用GB/T 5182—1996代替ISO 2330:1974。
——第2章和12.2中用ISO 6055:1997代替ISO 6055:1979。
——增加了8.5.1.4.1 c)。
——在11.1.1.1中增加:链条的安全系数不得小于5。
——在11.1.2.2中增加:货叉的自然下滑量在10min内不得大于100mm。
——删除了附录A和附录B。
本标准自生效之日起,同时代替GB 10827—1989。
本标准由国家机械工业局提出。
本标准由北京起重运输机械研究所归口。
本标准起草单位:北京起重运输机械研究所。林德—厦门叉车有限公司、安徽合力股份有限公司、杭州叉车总厂、大连叉车总厂参加起草。
本标准主要起草人:纪兵、黎土刚、陶佳红、许春祥、马适贤。
ISO前言
ISO(国际标准化组织)是各国标准化团体(1SO成员团体)的全球性组织。各项国际标准的起草工作主要是通过ISO各个技术委员会完成的。对已建立技术委员会的某一项议题感兴趣的每一个成员团体均有权派代表参加该技术委员会。一些与ISO有联系的官方的和非官方的国际组织也可参与此项工作。
技术委员会已采纳的国际标准草案,在未得到ISO理事会同意将其作为国际标准之前,应分发至各成员团体进行投票表决。
国际标准ISO 3691由ISO/TC 110工业车辆技术委员会起草。
ISO 3691第二版包含附录1:1978和附录2草案,它们分别于1977年1月和1978年10月被分发给各成员团体。它撤消并取代了第一版ISO 3691:1977。
第二版的全部内容得到下列国家的成员团体投票通过:
奥地利 荷兰 瑞典 比利时 波兰 瑞士 捷克斯洛伐克
罗马尼亚 美国 法国 南非 苏联 印度 西班牙 南斯拉夫
附录1:1978得到下列国家成员团体的通过:
巴西 联邦德国 新西兰 保加利亚 意大利 土耳其
丹麦 日本 芬兰 朝鲜
附录2草案得到下列国家成员团体的通过:
丹麦 日本 墨西哥 英国
下列国家的成员团体表示不赞成ISO 3691的第一版或1975年分发给各成员团体的附录1和附录2:
联邦德国 日本 新西兰 英国
下列国家成员团体表示不赞成附录1:1978:
澳大利亚 英国
下列国家成员团体表示不赞成附录2草案:
澳大利亚 联邦德国 新西兰
1 范围
本标准规定了机动工业车辆在制造、使用、操作和维护方面的安全要求。
本标准适用于在第3章中所描述的用来搬运、推顶、牵引、起升、堆垛或码放各种货物的动力驱动的机动工业车辆。
2 引用标准
下列标准所包含的条文,通过在本标准中引用而构成为本标准的条文。本标准出版时,所示版本均为有效。所有标准都会被修订,使用本标准的各方应探讨使用下列标准最新版本的可能性。
GB/T 5142—1985 前移式和插腿式叉车 稳定性试验 (idt ISO 3184:1974)
GB/T 5182—1996 叉车 货叉 技术要求和试验 (idt ISO 2330:1995)
GB/T 6104—1985 机动工业车辆名词术语 (neq ISO 5053—1:1980)
GB/T 7593—1987 机动工业车辆 控制符号 (eqv ISO 3287:1978)
ISO 1074;1991 平衡重式叉车 稳定性试验
ISO 1084:1975 工业用牵引车 定义及额定能力
ISO 5766:1990 托盘堆垛车和平台堆垛车 稳定性试验
ISO 5767:1992 工业车辆在门架前倾的特定条件下堆垛作业 附加稳定性试验
ISO 6055:1997 乘驾式高起升车辆护顶架 技术要求和试验方法
ISO 6292:1996 机动工业车辆和牵引车 制动器性能和零件强度
ISO 8379:1998 越野叉车 稳定性试验
3 术语、分类和定义
机动工业车辆的术语、分类和定义按GB/T 6104的规定。
第一篇 机动工业车辆制造厂应遵守的安全规范
4 额定能力
机动工业车辆的额定能力是指在4.1~4.5中规定的条件下,车辆正常运行或起升的最大载荷。它是根据车辆各个零件的强度和本标准第6章中所规定的稳定性要求和试验确定的。
4.1 固定平台搬运车
固定平台搬运车的额定能力是指在正常的作业条件下,车辆能运载的在载货平台上均匀分布的最大载荷,称为额定载重量。
4.2 高起升车辆
4.2.1 平衡重式叉车
平衡重式叉车的额定能力是指门架处于垂直状态时,在标准载荷中心距D(DH和DV)的条件下,车辆能起升到3.3m时的最大载荷,称为额定起重量。
DH是指载荷重心到货叉垂直段前表面的水平距离;DV是指载荷重心到货叉水平段上表面的垂直距离。
当额定起重量小于1 000 kg时,DH=DV=400 mm;当额定起重量大于等于1 000 kg且小于5 000kg时,DH=DV=500mm;当额定起重量大于等于5 000kg且小于等于10 000 kg时,DH=DV=600 mm。
注:当额定起重量为1 000kg时,允许DH=DV=400mm,当额定起重量为5 000kg时,允许DHDV=500mm。
起升高度小于3.3 m的叉车,以最大起升高度时的最大起重量作为额定起重量;起升高度大于3.3m的叉车,以起升3.3m时的最大起重量作为额定起重量,在最大起升高度时的最大起重量称为最大起升高度起重量。
4.2.2 前移式叉车和插腿式叉车
前移式叉车和插腿式叉车的额定能力是指在标准载荷中心距D、门架垂直、货叉水平条件下,起升3.3m高时,车辆能正常运载和起升的最大载荷,称为额定起重量。
标准载荷中心距D是指载荷重心到货叉垂直段前表面的水平距离。D必须为400mm、500mm或600 mm。
4.2.3 托盘堆垛车和平台堆垛车
托盘堆垛车和平台堆垛车的额定能力是指车体宽度大于货叉(或平台)宽度,但不超过690mm,起升高度为2.5 m时;或车体宽度大于690mm,起升高度为3.3m时,车辆能正常运载和起升标准载荷中心距为D的最大载荷,称为额定起重量。
标准载荷中心距D是指载荷重心到货叉垂直段前表面或平台安装面的水平距离。D必须为400mm、500mm或600mm。
4.2.4 拣选车
4.2.5 侧面式叉车
4.3 低起升车辆(托盘搬运车、平台搬运车和非堆垛跨车)
低起升车辆的额定能力是指车辆能运载的均匀分布的最大载荷,称为额定载重量。
4.4 牵引车
牵引车的额定能力按ISO 1084:1975中第3章的规定。
4.5 可拆卸式属具
可拆卸式属具的额定能力是指在规定载荷中心距和规定的正常作业条件下属具能搬运的最大载荷。
5 标牌
5.1 机动工业车辆
每台机动工业车辆在出厂时,必须在车辆的显著位置装有永久固定的标牌,上面必须注明车辆在出厂时的状况并以不易抹掉的字迹标明下列内容:
5.1.1 内燃车辆
a)制造厂名称(如果要求,可包括销售商的名称),如果要求,可包括制造厂的商标;
b)产品名称及型号;
c)制造日期或产品编号;
d)作业状态下,无载时自重。如平衡重式叉车自重,包括货叉,但不包括可拆卸式属具的重量;
e)最大能力(对于高起升车辆和低起升车辆,是指在规定载荷中心距条件下,承载装置在最大起升高度时的能力;对于固定平台搬运车,是指额定载重量;对于牵引车,是指额定牵引力)。
5.1.2 电动车辆
a)制造厂名称(如果要求,可包括销售商的名称),如果要求,可包括制造厂的商标;
b)产品名称及型号;
c)制造日期或产品编号;
d)作业状态下,无载时自重。如平衡重式叉车自重,包括货叉,但不包括可拆卸式属具的重量;
e)最大能力(对于高起升车辆和低起升车辆,是指在规定载荷中心距条件下,承载装置在最大起升高度时的能力;对于固定平台搬运车,是指额定载重量;对于牵引车,是指额定牵引力)。
f)无载、无蓄电池时的车辆自重;
g)允许的最大和最小蓄电池重量;
h)车辆电气系统中蓄电池的额定电压。
5.1.3 带有前端属具的车辆
除了在5.1.1或5.1.2中所列的内容,标牌中还必须包含下列内容:
a)属具名称及型号;
b)无货叉但装有属具的车辆,在无载作业状态时的自重;
c)装有属具的车辆在最大起升高度时的能力。
注
1 允许在标牌上注明制造厂规定的额定能力。
2 如果要求,车辆的承载能力可以在独立的标牌上注明。
3 如果屑具不是通过厂家而是通过销售商购入的,则销售商有责任在车上另外附加一个标牌,上面标有销售商的名称以及5.1.1、5.1.2和5.1.3所要求的内容。
5.2 可拆卸式属具
每一可拆卸式属具必须带有包括下列内容的单独的标牌:
a)制造厂名称(如果要求,可包括销售商的名称);
b)产品名称及型号;
c)制造日期或产品编号;
d)属具重量和从属具安装面到属具重心的距离;
e)属具的额定能力。
注:标牌上还必须注明下列内容:
“警告:属具的实际载荷可能受到车辆能力的限制。”
5.3 电动车辆蓄电池
牵引蓄电池必须带有标明下列内容的标牌:
a)制造厂名称;
b)产品名称及型号;
c)制造日期或产品编号;
d)额定电压;
e)5h放电率时的容量(Ah);
f)重量。包括在作业状态时的可拆卸式容器(和配重)的重量。
另外,蓄电池重量也可标在可拆卸式容器(和配重)的起吊处附近。
5.4 特殊用途
如果车辆在非正常作业条件下使用,必须在车辆的显著位置上固定一个耐久性标牌,上面必须标明下列内容:
a)特殊使用条件的规定;
b)特殊使用条件下车辆的能力。
6 稳定性要求和试验方法
机动工业车辆必须符合6.1~6.7中所规定的稳定性试验方法的要求。制定这些试验方法的目的在于确保高起升工业车辆在正常作业条件下正确操纵时,具有足够的稳定性。制造厂必须在投产车型的样机上进行稳定性试验。
6.1 平衡重式叉车
按ISO 1074的规定。
6.2 前移式叉车(门架或货叉伸缩)和插腿式叉车(步行式及乘驾式)
按GB/T 5142的规定。
6.3 托盘堆垛车与平台堆垛车(步行式及乘驾式)
按ISO 5766的规定。
6.4 拣选车
6.5 侧面式叉车
6.6 越野叉车
按ISO 8379的规定。
6.7 在门架前倾的特定条件下堆垛作业的车辆
按ISO 5767的规定。
注:在门架前倾的特定条件下堆垛作业的车辆除了要按照ISO 5767做附加稳定性试验之外,还必须做在正常作业条件下的稳定性试验。
7 制动器性能
在机动工业车辆上安装的制动器必须达到ISO 6292中规定的性能要求。
8 运行方向控制
8.1 总述
最佳控制就是使控制动作最接近人的自然反应。这类控制有时称为“方向性”,即控制动作的方向与车辆或附件所需的运动方向一致。有些控制如“前进”和“倒退”显然很容易实现“方向性”控制。
另一类控制动作的方向性则不太明显,必须经过仔细研究和试验以确定人的最自然反应。对操纵装置最适宜的控制动作和位置做出规定,是为了在此方面能统一做法。
另外,还有一些控制不具有“自然性”的要素,因此只能随意规定。但是,只有在仔细研究后表明这一控制动作确无方向性或自然性后,才允许采用随意规定的方法。遇到此种情况时,建议通过制定标准来形成统一的规定。
8.2 车辆前端和车辆运行的前进方向
8.2.1 车辆前端
车辆前端就是在图1~图18中靠近箭头的一端。
8.2.2 车辆后端、左侧和右侧
车辆后端、左侧和右侧与8.2.1中所给的定义一致。
8.2.3 车辆运行的前进方向
车辆运行的前进方向是图1~图18中箭头所指的方向。图示均为车辆的平面图。
8.2.3.1 坐驾式车辆
8.2.3.1.1 向前进方向运行时载荷在车辆前端的车辆。
a)平衡重式叉车(图1);
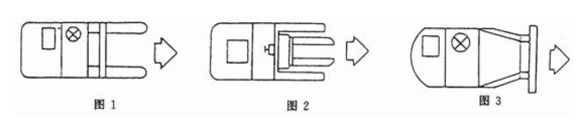
b)插腿式叉车或前移式叉车(门架或货叉伸缩)(图2);
c)调车用牵引车(图3)。
8.2.3.1.2 向前进方向运行时载荷在车辆后端的车辆
a)插腿式叉车或前移式叉车(门架或货叉伸缩),驾驶员侧坐(图4);
b)前端控制的牵引车(图5);
c)后端控制的牵引车(图6);
d)固定平台搬运车(图7)

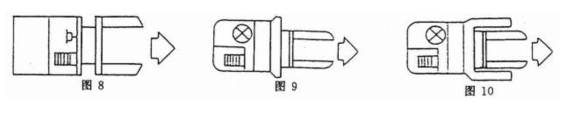
8.2.3.2 站驾式车辆
8.2.3.2.1 中间位置控制
向前进方向运行时载荷在车辆前端的车辆。
平衡重式叉车(图8)。
8.2.3.2.2 后端控制
8.2.3.2.2.1 向前进方向运行时载荷在车辆前端的车辆
a)平衡重式叉车(图9);
b)插腿式叉车或前移式叉车(门架或货叉伸缩)(图10)。
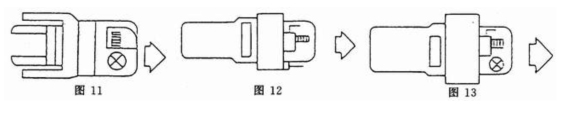
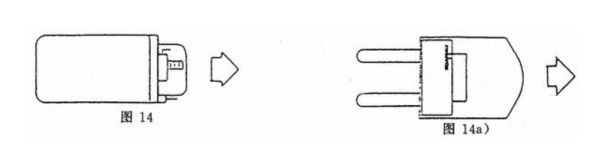
8.2.3.2.2.2 向前进方向运行时载荷在车辆后端的车辆
a)插腿式叉车或前移式叉车(门架或货叉伸缩),驾驶员侧向站式操纵(图11);
b)平台堆垛车或平台搬运车(图12、图13);
c)固定平台搬运车(图14);
d)拣选车(图14a))。
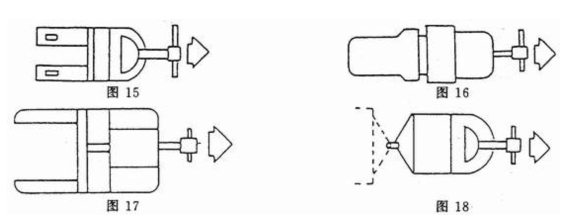
8.2.3.3 步行式车辆
向前进方向运行时载荷在车辆后端的车辆。
a)托盘搬运车(图15);
b)平台堆垛车或平台搬运车(图16);
c)平衡重式叉车(图17);
d)牵引车(图18)。
8.3 转向操纵
8.3.1 乘驾式车辆的转向
a)所有转向操纵装置必须限定在车辆外轮廓线之内或加以防护,以免在车辆经过障碍物、墙壁以及立柱等物体时,驾驶员因操纵转向装置而受到损伤;
b)在必须由一只手完成转向操纵的场合,为了安全操作必须装有转向手把。此手把必须装在方向盘的周边内并采取措施以防驾驶员的手受到损伤;
c)在使用中产生转向冲击时,该冲击力传递到方向盘时,必须将其限制在驾驶员的手或臂不受损伤的限度内;
d)在采用方向盘和手把的场合,必须设计成使道路的反作用力引起方向盘自转的危险性减至最低程度,或者转向机构必须能防止道路的反作用力引起方向盘的自转。
e)建议如采用转向手把时,其形式为驾驶员从手把顶部握住,而且其位置在方向盘周边之内。
8.3.1.1 方向盘
8.3.1.1.1 在驾驶员面向车辆的正常运行线路,采用方向盘(水平、倾斜或垂直的)转向的所有车辆中,顺时针转动方向盘必须使车辆在向前进方向运行时右转弯(图19,图19a))。
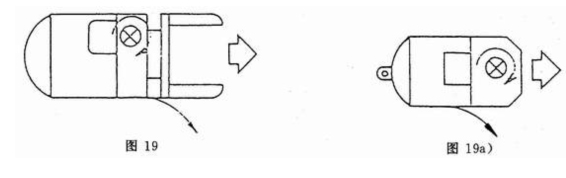
注:在8.2.3.1.2a)和8.2.3.2.2中指出的各种型式的车辆,有相当数量与上述标准规定的转弯方向相反,这类车辆在将操纵装置的功能和操纵方式标明后仍可使用。
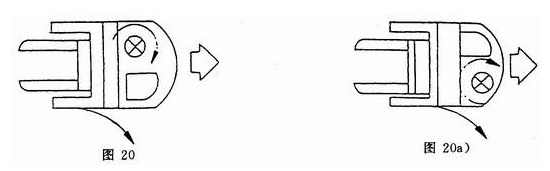
8.3.1.1.2 在驾驶员面对方向与车辆的正常运行路线成直角,并用方向盘(水平、倾斜或垂直的)转向的所有车辆中,顺时针方向转动方向盘时,后端载货的车辆向前进方向运行时必须顺时针方向转弯(8.3.1.1.1中的注也适用于本条)(图20,图20a))。
8.3.1.2 转向操纵杆
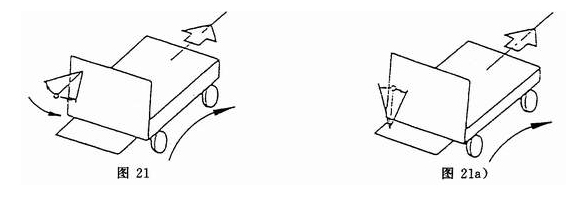
8.3.1.2.1 在水平面内运动的转向操纵杆
在用转向操纵杆转向的车辆中,转向操纵杆在水平面内转动,而且其中间位置与车辆的纵向轴线平行;或者转向操纵杆在平行于车辆纵向轴线的一根轴上转动,而且其中间位置直立向上,那么当驾驶员面向车辆运行方向时,转向操纵杆向右侧移动必须使车辆向右侧转弯(图21,图21a))。
8.3.1.2.2 在垂直面内运动的转向操纵杆
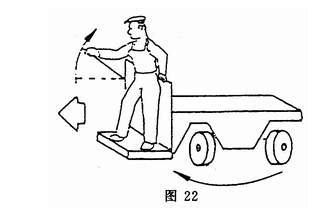
在站驾式平台堆垛车(8.2.3.2.2.2b))和站驾式固定平台搬运车(8.2.3.2.2.2c))上,若用装在驾驶员右侧的转向操纵杆转向,而且转向杆在垂直面内转动时,向上抬起转向操纵杆(顺时针转动)时,向前进方向运行的车辆必须右转弯(图22)(8.3.1.1.1中的注也适用于本条)。
8.3.2 控制器在手柄上的步行式和乘驾式机动工业车辆的转向手柄
8.3.2.1 在突沿上的手柄必须装有适当的保护装置,以防驾驶员的手受到门、墙壁、立柱等的伤害。
8.3.2.2 对于采用转向手柄操纵转向而转向手柄突出在车辆轮廓线之外的步行式和乘驾式机动工业车辆必须如下转向:
步行式车辆,当驾驶员面向车辆的运行方向而载荷位于车辆运行方向的后方时,顺时针方向转动转向手柄,必须使车辆顺时针方向转弯。
乘驾式车辆,当驾驶员面向车辆的运行方向而载荷位于车辆运行方向的后方时,顺时针方向转动转向手柄,必须使车辆顺时针方向转弯。
8.3.3 转轴式转向操纵
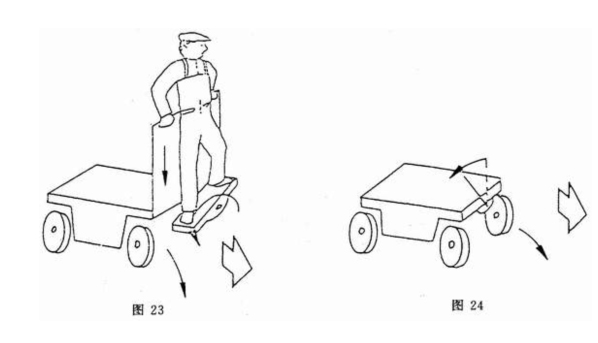
在用脚(图23)或用手(图24)操纵转轴式转向操纵装置实现转向的车辆中,沿车辆的前进方向观察,顺时针方向转动这种操纵装置时,车辆必须右转弯。
8.4 运行控制和制动控制
在所有机动工业车辆中,都必须装有停车制动器(或停车机构)。它可以是行车制动器的一部分或包括行车制动器。停车制动器(或停车机构)必须由人工操纵或自动控制,如果不是人为释放,它将始终处于制动状态。
车上必须装有一种装置,可用它断开电动车辆的控制线路和内燃车辆的点火装置和/或起动装置,或使它们不能工作。
8.4.1 坐驾式车辆
8.4.1.1 踏板
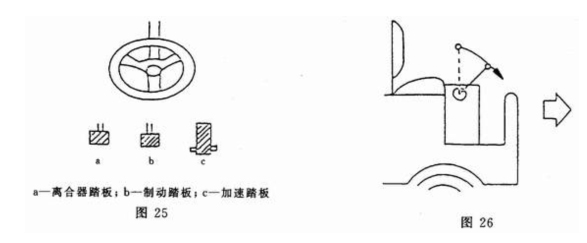
在所有坐驾式车辆中的加速踏板和制动踏板(有的还装有离合器踏板)应按图25所示布置(从驾驶位置观察)。
在踏板布置与图25所示不同的场合,其功能必须清楚地在使用说明书中和在车体上标明。
8.4.1.2 换档手柄
换档手柄的位置必须清楚地标明。
8.4.1.3 换向手柄
内燃车辆的换向手柄和电动车辆的控制手柄其操纵方向必须与车辆的运行方向一致(图26)。
8.4.1.4 坐驾式电动车辆的安全控制和制动器
车上应装有在驾驶员离开车辆时能自动切断运行电路的装置。
运行操纵的设计必须符合下列原则:对于方向控制机构有前进、后退和中位三个位置的车辆,只有在方向控制处于前进或后退位置时车辆才能运行。在速度控制动作之前车辆可以不动,也可以以不高于微动速度运行。对于方向控制只具有前进和后退两个位置而不具备中位的车辆,在速度控制动作之前,不允许车辆运行。
用脚操纵的加速踏板,必须位于右脚操作位置,而且踩下踏板时,必须增大车速。
如果用脚操纵行车制动器,当踩下踏板时行车制动器必须起制动作用。
在采用一个踏板来控制加速和制动两种功能时,踏板必须位于右脚操作位置。而且当向下踩踏板时,必须释放制动器和增大车速。相反,当放松踏板时,必须减小车速和进行制动。
8.4.1.5 坐驾式内燃车辆的安全控制与制动器
运行操纵的设计必须符合下列原则;只对方向控制器进行操作时,车辆可以运行,但车速不得超过微动速度。
如果用脚操纵行车制动器,那么当踩下踏板时它必须起制动作用。
如果采用离合器和制动器联合踏板,那么踏板的最初行程必须使离合器脱开,最终行程必须使制动器起制动作用,踏板必须用左脚操纵。
如果用脚操纵加速踏板,那么当踩下踏板时必须增大车速。
如果采用联合踏板控制加速和制动两个动作时,那么当踩下加速踏板部分必须增大车速,而踩下制动踏板部分必须起制动作用。联合踏板必须用右脚操纵。
如果装有离合器踏板,那么在用左脚踩下踏板时必须脱开离合器。
8.4.2 站驾式车辆
8.4.2.1 踏板
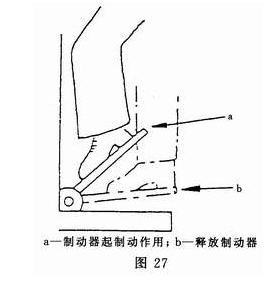
车辆在运行时驾驶员的脚应始终停留在踏板上。踩下踏板时,必须释放所有制动器,使车辆得以运行(图27)。踏板提起时,应使行车制动器起制动作用。
对于踩下踏板时行车制动器起制动作用的车辆,踩下踏板时必须使行车制动器起制动作用。
8.4.2.2 手柄
在8.4.1.2和8.4.1.3中所述的操纵装置也适用于站驾式车辆。
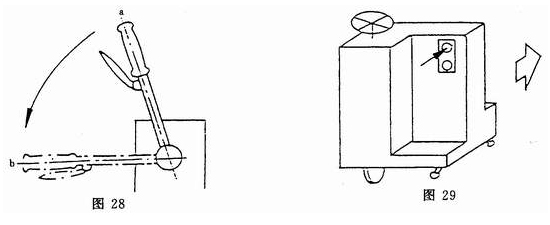
在装有手柄的场合,扳下手柄必须释放制动器使车辆得以运行(图28,位置b)。松开手柄则制动器必须起制动作用(图28,位置a)。车辆运行时,驾驶员应始终将手放在手柄上。
8.4.2.3 按钮
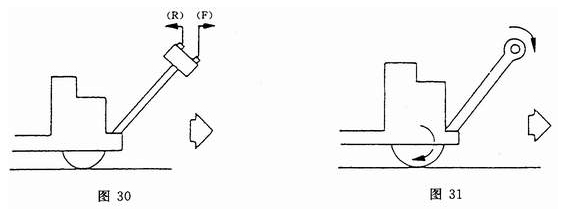
8.4.2.3.1 用上下布置的按钮选择车辆的运行方向时,按下上面的按钮必须使车辆如8.2.3中的规定向前运行(图29)。
8.4.2.3.2 用水平布置的按钮选择车辆的运行方向时,必须清楚地标明每个按钮所控制的方向。
8.4.2.3.3 当松开手指时,所有控制方向的按钮都必须回到中间位置。
8.4.2.4 站驾式电动车辆的安全控制与制动器
车上应装有当驾驶员离开时可自动切断运行电路的装置。
车上必须装有这样的装置:只有当驾驶员处在驾驶位置上,释放停车制动器,重新选定速度控制器和/或方向控制器的位置后,运行电路才能起作用。
8.4.2.5 站驾式内燃车辆的安全控制与制动器
如果用脚操纵加速踏板,那么当用右脚踩下踏板时必须增大车速。
运行控制器的设计必须符合下列原则:只对方向控制器进行操作时,车辆可以运行,但车速不得超过微动速度。
8.4.3 步行式车辆
8.4.3.1 步行式电动车辆
8.4.3.1.1 车辆的前进和后退运动必须采用控制器进行控制或选择,当用手握住转向杆的操纵手柄时必须很容易触摸到此控制器。控制器必须按照下列方法之一实现方向控制:
a)控制器向前运动时,必须使车辆前进,控制器向后运动时,必须使车辆后退。
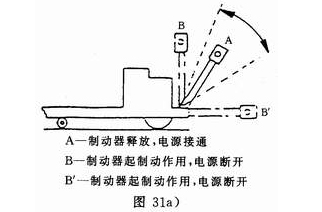
b)当转向杆大至位于垂直位置时,控制器的两个按钮必须位于操纵手柄的上端。前面的按钮(F)用于使车辆前进,而后面的按钮(R)用于使车辆倒退(图30)。
c)控制器必须具有回转动作,其回转方向必须与车辆驱动轮的旋转方向一致(图31)。
在运行控制器上必须用清晰和耐久标志标明其功能和动作方向。
8.4.3.1.2 转向杆必须在垂直平面内运动。如果制动器是机械操纵的,而且当转向杆处于垂直位置(B)或水平位置(B,)时,那么制动器必须起制动作用,电源切断(不管此时运行控制开关是否将电源切断)(图31a))。
若制动器是电控操纵的,则不论转向杆在什么位置,松开转向杆或运行控制器开关都必须自动切断电源和使制动器起制动作用(“粗心人”控制原理)。
注:当电源切断时,8.4.3.1.2中的要求并不妨碍转向轮的“自由转向”。
8.4.3.2 步行式内燃车辆
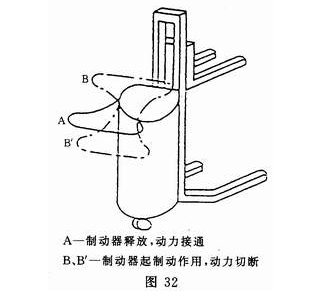
转向杆必须在垂直平面内运动。如果发动机和车轮之间为机械传动(即非发电机、电动机驱动),那么当转向杆运动到水平面A的上方B或下方B,时(图32),必须切断发动机与车轮之间的动力传动,制动器起制动作用。
8.4.4 高起升拣选车
车辆必须装有在驾驶员离开时,使运行控制器的功能处于无效状态的装置。
车辆上必须装有这样的装置,它能保证当使用起升平台上的控制器时,其他控制器的功能均处于无效状态。在同一时间内,只能使用一个控制器。
车辆的起升平台上必须装有可供位于起升平台上的驾驶员切断动力的装置。
运行控制器必须这样设计:在速度控制器与方向控制器动作后,车辆才能运行。车辆的起升平台在各种位置条件下,车速必须能满足车辆的稳定性要求。
8.4.5 制动器
见第7章。
8.5 载荷移动控制
8.5.1 用手柄控制
8.5.1.1 手柄位置
手柄应位于驾驶员右手位置并与运行控制器明显地区分开。
应把控制手柄的功能标清楚。如采用图形符号,则必须符合GB/T 7593的规定,每个图形符号必须固定在其对应的操纵杆上或附近。
8.5.1.2 垂直手柄
8.5.1.2.1 不具备伸缩门架或货叉的叉车
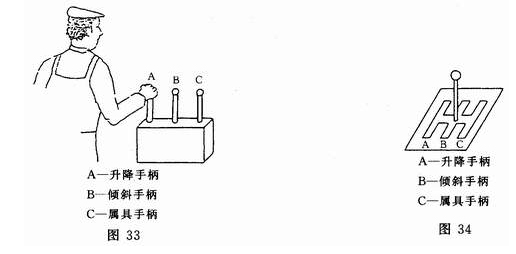
a)操纵手柄在垂直面内动作时(图33),最靠近驾驶员的手柄(A)必须是货叉起升和下降手柄,邻近的(B)是门架前倾和后倾手柄,(C)是在需要安装属具时,属具的控制手柄。
b)当采用单一手柄和控制门时,其手柄的操纵方式必须与8.5.1.2.1a)相一致(图34)。
8.5.1.2.2 有伸缩门架或货叉的叉车
第一个手柄(A)必须用于起升和下降,第二个手柄(B′)必须用于门架或货叉的前伸和后缩,如装有第三个手柄(B),则必须用于倾斜,其他的手柄(C)用于控制屑具(图35)。
8.5.1.3 水平手柄
8.5.1.3.1 不具备伸缩门架或货叉的叉车
a)操纵杆在水平平面内(如在方向盘下方)动作时(图36),最高的手柄(A)必须用于载荷的起升和下降,中间的手柄(B)用于门架的倾斜,最低的其他手柄(C)用于控制属具。
b)在采用单一手柄和控制门时,其手柄的操作方式必须与8.5.1.3.1a)相一致。

8.5.1.3.2 有伸缩门架或货叉的叉车
第一个手柄必须用于载荷的升降,第二个手柄(B′)用于门架或货叉的前、后移动,如果装有第三个手柄(B),那么它必须用于倾斜,而其他的手柄(C)用于控制属具(图37)。
8.5.1.4 手柄动作
8.5.1.4.1 不具备伸缩门架或货叉的叉车
a)当手柄在8.5.1.2和8.5.1.3中所示的位置时,必须是拉动手柄(A)则起升,推动手柄(A)则下降;拉动手柄(B)则后倾,推动手柄(B)则前倾(图38)。

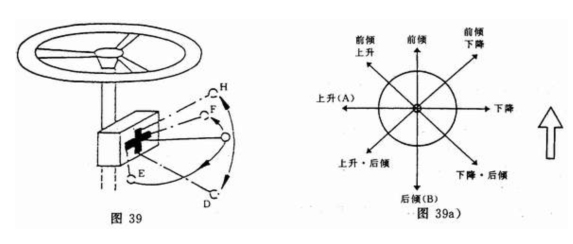
b)当位于方向盘下面的单一手柄沿十字形控制门动作时,手柄在垂直平面内上下动作必须用于升降(上至(H)用于起升,下至(D)用于下降),在水平平面内的动作用于倾斜(拉至(E)用于后倾,推至(F)用于前倾)(图39)。
c)当利用以支点为中心、可在360°范围内运动的多功能单一手柄,同时(联合)或分别实现升降、倾斜两种功能时(此种手柄的中间位置直立向上,且没有像图34所示的门形限位窗口),手柄的操纵方向与门架和货叉的动作方向必须按图39a)(图中箭头所指方向为驾驶员操纵手柄时所面对的方向)所示那样设计。手柄定位机构的设计必须保证手柄在同时操作和分别操作两种情况下,在操纵力或其他方面有所不同,而且分别操作必须比联合操作更容易。
对于和8.5.1.1~8.5.1.4中所述不同的车辆,车辆各手柄的功能和操纵方式标清后仍可使用。
8.5.1.4.2 有伸缩门架或货叉的叉车
必须是拉动手柄(B′),门架或货叉后缩,推动手柄(B′),门架或货叉前伸(图40)。
8.5.1.5 屑具
用于控制附属装置的手柄,其操纵方向应尽可能符合人的最自然反应。
示例:
夹持器:拉动手柄使其夹紧,推动手柄使其松开(图41)。
旋转叉:拉动手柄旋转头顺时针方向回转,推动手柄则逆时针方向回转(图42)。
铲斗:拉动手柄使铲斗上翻,推动手柄使铲斗下翻(图43)。
侧移叉:拉动手柄货叉向驾驶员右侧移动(图44)。
8.5.1.6 标志
如果有几个手柄,那么必须用清晰和耐久标志标明每个手柄的功能。
8.5.1.7 自动返回中间位置
所有手柄都必须能自动返回中间位置。

8.5.2 用按钮控制
用按钮控制车辆的升降、倾斜和附属装置的动作时,这些按钮放松时必须回到中间位置,并且按钮的位置布置必须保证按下按钮与在同一方向(相对于驾驶员的位置而言)上移动操纵手柄具有同样的效果。对于沿着平行于车辆纵向轴线布置的按钮,当按动靠后的一个按钮(相对驾驶员的位置而言)时,必须实现与向后拉操纵手柄同样的功能。
必须采用清晰和耐久标志标明每一按钮的功能。
8.5.3 回转控制
回转控制装置的上表面的回转运动必须和手柄动作方向一致。
8.5.4 特殊控制
特殊控制(如用于预选或自动装置)必须标明并符合上述规定。
9 控制符号
机动工业车辆所使用的控制符号,必须符合GB/T 7593的规定。
10 对动力系统及附件的要求
10.1 普通环境
10.1.1 内燃车辆(以柴油、汽油以及液化石油气为燃料)
10.1.1.1 排气系统和冷却系统
排气系统和冷却系统气流的布置必须充分考虑到驾驶员和其他人员的舒适和健康。
10.1.1.2 燃油箱
燃油箱不能直接放在发动机上方,如果燃油箱放在发动机隔间内,或靠近发动机隔间,那么燃油箱和加油设备必须用单独的封罩或挡板与电气系统和排气系统隔开。
燃油箱和加油设备外溢或漏出的燃油只可以流到地面上,而不得流到发动机、电气系统、排气系统部件上或驾驶室内。在作业条件下不允许燃油外溢。
燃油箱和加油设备必须位于车上使其遭到损坏的可能性最小的部位。
10.1.1.3 燃油系统
燃油系统的所有部件必须牢固地固定在车辆上,紧固件的布置必须尽量减小各部件的振动。
10.1.2 对使用液化石油气的内燃车辆的附加要求
10.1.2.1 容器
10.1.2.1.1 液化石油气容器可以永久地固定在车上,也可以快拆。液化石油气容器必须符合国家现行的有关压力容器方面的规定。
10.1.2.1.2 必须对装在车上的容器加以防护,以免锈蚀或被大气以及所搬运的物品腐蚀。
10.1.2.1.3 容器必须牢固地固定在车上,不得因振动而松脱。
10.1.2.1.4 不论是固定式还是可拆卸式容器,都必须装有一个能防止当管路破裂时大量石油气突然溢出的装置。车上必须安装易于接近的人工操纵的阀门并以此来排出容器中的燃料。除非容器和发动机专门装有可直接排出气体的设施,否则燃料必须以液态排出。
10.1.2.1.5 所有容器必须具有下列附件:
a)与容器的汽化空间相通的合适的安全阀。当容器装在车辆的隔间里时,安全阀的排气端必须用管路接到大气中。
b)固定式最高液位指示器。
c)容器装在车辆隔间内时,最高液位指示器上用于把气体排到大气中去的排气口必须装在车体外侧容易看到的位置。
1)具有排气功能的最高液位指示器的排气孔直径不得大于1.5 mm,而且在进行正常的测量操作时,也不得将指示器上的零件完全拆下。
2)所有最高液位指示器都必须适合所用的液化石油气,而且能指示最高液位。容器中的液面高度不得超过国家现行的规定值或推荐值。
3)如果装有液位计,那么它不得向大气排气。
10.1.2.1.6 如果容器装在隔间内,那么隔间的顶部和底部必须开永久性通气孔,以便隔间和大气相通。
10.1.2.1.7 对于可拆卸式容器,它必须便于拆装,而且在更换完容器之后便于检查其安装情况。
10.1.2.1.8 在车上装有可拆卸式容器时,必须保证容器上安全阀(见10.1.2.1.5)的开口始终与容器中的汽化空间(顶部)相通。容器安装合适时,可使用定位销将容器定位。
10.1.2.1.9 如果在车上还装有备用容器或附加容器,那么它必须按10.1.2.1.3和10.1.2.1.8中的要求,牢固固定。
10.1.2.1.10 如果容器在露天存放,建议使用不受气候影响的盖,以保护连接处。
10.1.2.2 管路
10.1.2.2.1 连接管路和所有相关部件必须易于接近,并加以保护,以防磨损和损坏。它们还必须有足够的韧性,以承受使用中的振动和变形。管路系统的布置必须能便于检查出损坏和渗漏,管路的安装方式必须使其不致受到发动机高温部件的损坏。容器和发动机上设备间的连接管路不得全部采用刚性的管子。
10.1.2.2.2 软管和所有接头必须能承受3MPa的压力。一旦管路出现损坏或变质迹象,必须立即更换。
10.1.2.2.3 容器及其接头的安装不得突出车体轮廓线以外,容器的接头必须用刚性的保护件加以防护。
10.1.2.2.4 在两个可能关闭的截止阀之间含有液化石油气的管路的所有区段,必须安装适当的减压阀以防压力过大。
10.1.2.2.5 在用于输送液体的管路系统中不得采用铝管。
10.1.2.3 设备
10.1.2.3.1 当发动机停止运转时,不论点火系统是否切断,必须自动切断液化石油气的供给。
10.1.2.3.2 使用多种燃料时,燃料供应系统的设计必须避免液化石油气进入任何其他燃料容器中的可能性,并且在接通一种燃料以前,必须切断其他燃料的供给。
10.1.2.3.3 所安装的安全阀或液位指示器不得把排泄物排放到可能是点火源的部件上。
10.1.2.3.4 如果腐蚀会影响某一部件的正常功能,那么该部件必须涂以防腐层。
10.1.3 电动车辆
10.1.3.1 蓄电池
10.1.3.1.1 在蓄电池接线端子上方必须留有至少30mm的空间,或为蓄电池盖安装绝缘内衬。
采用空间绝缘的金属盖(在蓄电池或隔间上)必须具有这样的刚度和强度:在金属盖上300mm×300mm面积的几何中心处作用一个980N的力时,金属盖不得与蓄电池的接线端子相接触。
采用绝缘时,绝缘层必须安装在蓄电池隔间金属盖的内表面上。
10.1.3.1.2 在蓄电池容器或隔间中蓄电池的上方必须开有通气孔。
10.1.3.1.3 如果金属盖上开有通气孔,那么必须防止异物进入。金属盖必须有足够的刚性以免在正常使用中由于盖的扭曲,导致盖与蓄电池的带电部分相接触。
10.1.3.1.4 车上的蓄电池和容器必须固定牢靠,在车辆正常使用时,它们不得位移。
10.1.3.2 充电连接器
充电连接器连接充电时,必须切断蓄电池与车上各种工作回路之间的连接。
10.1.3.3 电气设备
车辆在作业状态时,必须防止通电部分意外短路。
10.1.3.4 电阻器
所有电阻器放置的位置,必须能避免电阻器过热和损坏。
10.2 爆炸危险环境
10.2.1 用于易燃、易爆环境中的所有机动工业车辆,必须按照国家相应条例和法规的要求进行设计或符合其要求。
10.2.2 这类车辆必须清楚地用适当的类型符号标明。
11 用子起升、倾斜和其他动作的装置和部件
11.1 起升装置
11.1.1 机械起升装置
11.1.1.1 链条、钢丝绳及其固定件
这些部件用于起升装置时,必须选用可靠的材料,具有足够的强度并不得有影响安全使用的缺陷。其中链条的安全系数不得小于5。
11.1.1.2 货叉承载设定
对一组货叉的承载必须建立在下述设定的基础土:
——集中载荷均等分配到一组货叉的水平段上;
——按静力学法则将载荷分配到一组货叉的水平段上。
11.1.1.3 货叉的技术特性
实心截面的货叉必须符合GB/T 5182的要求。
11.1.1.4 货叉的固定
货叉架和货叉必须按下列要求设计和制造:
——防止货叉从货叉架上意外脱落;
——防止货叉意外横向滑移或脱落。
11.1.1.5 属具的固定
属具必须按下列要求设计和制造:
——防止属具从货叉架上意外脱落;
——防止属具意外横向移动。
11.1.1.6 限位装置
动力驱动的升降装置必须装备防止载货架越程的装置。
11.1.2 液压起升装置
11.1.2.1 除电磁阀控制外,起升速度和下降速度都必须可变,并由驾驶员控制。
11.1.2.2 货叉的自然下滑量在10min内不得大于100mm。载货架下降速度在任何情况下不得超过1.0m/s,包括液压管路系统管路出现破裂的情况。
11.1.2.3 其他情况,见第14章和15章。
11.2倾斜装置
11.2.1 除电磁阀控制外,门架的倾斜速度必须可变,并由驾驶员控制。
11.2.2 其他情况,见11.4中的内容。
11.3 属具
11.3.1 除电磁阀控制外,属具动作必须可变,并由驾驶员控制。
11.3.2 其他情况,见11.4中的内容。
11.4 液压系统
11.4.1 软管、硬管与接头
软管、硬管和接头的材料必须可靠并有足够的强度,不得有影响安全使用的缺陷。
11.4.2 安全阀
所有液压系统都必须装有安全阀,如果该阀是可调的,那么它必须具有防止意外松动和未经批准而被调整的设施。
12 保护装置
12.1 总述
本章规定了对驾驶员的保护要求,同样也适用于车上供乘客使用的部位。
12.1.1 驾驶员位置
驾驶员位置的布置与设计必须保证当驾驶员在正常的操作位置时,驾驶员位于车辆的轮廓线之内。
步行式车辆除外。
驾驶员位置必须方便驾驶员出入。
驾驶室的地板和脚蹬必须有防滑表面。
注:本条中“驾驶员位置”术语是指驾驶员站着或坐着操纵车辆时的位置。
12.1.2 对驾驶员的保护
必须采取适当的措施,使驾驶员在正常的操作位置时,尽可能减少各运动部件可能造成对驾驶员伤害的危险。但这些预防措施不得过分妨碍驾驶员的视野和/或活动自由。
驾驶员在正常操作位置时,必须留有下列间隙以免驾驶员被门架挤压、剪切和夹住:
——手指 25 mm
——手或脚 50mm
——双臂或双腿 100mm
也可采用保护措施代替这些间隙尺寸。
12.2 护顶架
乘驾式高起升车辆必须安装护顶架或设有安装护顶架的接口。
护顶架及其接口必须满足ISO 6055的要求。
12.3 挡货架
高起升车辆在设计上必须保证可以安装挡货架。
12.4 驾驶台
12.4.1 在端部控制车辆上的驾驶台必须延伸到驾驶员位置之外。所设计的驾驶台必须能承受与满载车辆的重量相对应的压力,此压力沿着车辆的纵向轴线并作用在驾驶台最外端的垂直投影面上。
注:在本条中,术语“驾驶台”包括在车上沿驾驶台四周安装的能防止其被压坏的所有加固件或部件。
12.4.2 在车辆上悬着的驾驶台的侧面或前面必须装有保护装置。
步行式车辆除外。
12.4.3 对于折叠式或摆动式驾驶台,必须装有当驾驶员站在驾驶台上时能防止驾驶台意外折叠或摆动的装置。
12.4.4 自身高度或起升高度高于地面1 m以上的驾驶台1)必须装有扶手。
扶手的上表面到驾驶台地板上表面的高度不得小于900mm,也不得大于1 100mm,扶手必须能承受在水平面内沿任何方向900N的力。可拆式或铰接式扶手必须容易安装,固定位置容易辨认。
采用辅助平台1)(如拣选平台)时,驾驶台的开口(载荷)一侧的扶手可以省略,采用可拆卸式或铰接式扶手或在开口(载荷)侧省去扶手时,必须安装可防止驾驶员跌落的其他保护装置。
必须安装保护装置,以防驾驶员在其正常作业位置时可能受到车辆上运动部件的伤害。
12.5 工作平台1)(维修用)
用于起升人员的工作平台(如维修用)必须用附属装置把平台牢固地固定到起升装置上。
1)下面给出的工作平台、辅助平台以及驾驶台等定义仅供参考。
工作平台:安装在高起升叉车的起升装置上作为安全作业场所的平台。
驾驶台:车辆上驾驶员用于操纵车辆的部位。
辅助平台:可通过驾驶台到达的一种载货平台,它安装在高起升拣选车的起升装置上。
12.5.1 工作平台必须具有防滑表面,在自由侧的扶手必须满足12.4.4要求,沿工作平台四周必须装有至少高100mm的脚挡板并安装保护架以防车上运动部件伤害作业人员。
12.5.2 工作平台的结构必须满足规定的设计和制造要求。
12.6 车轮防护罩
车轮超出车体轮廓线时,必须对其采取有效的保护措施,以尽可能避免驾驶员在正常作业时受到车轮所抛出物体的伤害。
12.7 警示装置
乘驾式工业车辆必须安装能发出清晰声响的警示装置。
13 人机工程学与其他环境因素
第二篇 机动工业车辆在使用、操作与维护方面的安全规范
14 对用户和驾驶员的操作安全规则
为了良好使用机动工业车辆,本章建立了一些规则,14.1适用于用户,14.2适用于驾驶员。
14.1 适用于用户
所谓用户是指车辆的所有者或承租的个人或企业。
14.1.1 驾驶员的资格
机动工业车辆的驾驶员必须经过培训并通过考核取得操作证。
14.1.2 车辆在易燃、易爆环境中作业
只有得到国家权利机关的认可并获得可在易燃、易爆环境中作业许可证的机动工业车辆,才可以在此环境下作业。
这类车辆必须清楚地用适当的类型符号标明,有关的建筑物或场地也必须同样标明。
建筑物或场地环境状况的分类必须由用户与国家有关权利机关商定。
14.1.3 乘客
除了备有乘客专座外,车辆不得载客。禁止乘客登在起升机构或属具上,但下列情况除外:
装有工作平台的车辆(高起升拣选车除外):
a)平台必须可靠地固定在货叉架和/或货叉上。
b)如果平台上没有起升控制装置,那么当有人员在平台上时,驾驶员不得离开驾驶位置。
c)当有人员站在装有起升控制装置的平台上时,则只允许使用此平台上的起升控制装置。
d)平台、载荷和人员的总重不得超过车辆标牌上所标明的起重量的一半。
e)不得用车辆上的平台来运送人员。但为了人员的手工作业,车辆可作小范围的调整性运行。
14.1.4 车辆的使用
14.1.4.1 车辆能力和标牌的更改
车辆在使用时不得超过制造厂规定的额定能力。
未经制造厂批准,不得进行任何设计上的修改,也不得在车上附加任何物体,以免影响车辆的能力和作业安全。
由于采用附属装置而引起的修改,不得降低安全性并符合本规范的要求。采用了附属装置后,车辆的能力、操作和维修指示牌、标签或图案也必须作相应更改。
用户必须确保所有的标牌和标志都在规定的位置上,保持字迹清晰。
14.1.4.2 稳定性
用户应注意本规范第6章关于车辆在作业条件下的稳定性条款。
在正确操作时,符合第6章规定的高起升车辆是稳定的。但不正确的操作或错误的保养可能使车辆产生不稳定状态。
可能影响稳定性的因素是:地面和地板的情况、坡度、车速、载荷、蓄电池重量、动态力和静态力以及驾驶员所受的判断训练情况。
车辆作业时如与第6章规定的正常作业条件不同时,必须按要求减少载荷。
装有属具的车辆无载作业时,应视为部分承载。
14.1.4.3 防护要求和保护装置
车辆必须涂有与周围环境有明显区别的颜色。
乘驾式高起升车辆必须安装护顶架。在载荷不会掉落到驾驶员身上的场合可以例外。
用高起升车辆搬运可能会掉落危及驾驶员人身安全的载荷(如高的或多件堆叠货物)时,必须采用具有足够高度、宽度以及开口尺寸足够小的挡货架以防整个载荷或部分载荷掉到驾驶员身上。
在需要表示作业状态时,车辆必须附加警示装置,如灯光或闪光灯。
只有在制造厂允许的情况下,才允许在原来不带把手的方向盘上安装转向把手。
14.1.4.4 燃料搬运和储存
车辆必须在规定的地点加燃料。燃料站必须设有通风口,以使可燃气体的积累减至最少。在露天坑、地道入口、电梯井道或其他类似场合附近不得灌注液化石油气和更换可拆式液化石油气容器。
在加燃料地区禁止吸烟,并用标牌警告。
如果液体燃料不是由管道输送的,那么必须以密闭容器搬运。
只有经过培训和指定的人员才允许灌注或更换液化石油气容器。
储存和搬运液化石油气容器时,必须关紧灌注阀,并且安全阀必须直接与容器的汽化空间相通。容器储存时,在连接口上必须拧上保护盖。
在灌液和/或重新使用之前,必须检查容器,以确保不漏气。尤其注意阀和连接部位不得漏气。已损坏的容器不得使用。只有得到批准的企业才可以修理液化石油气容器。
14.1.4.5 蓄电池充电和更换
蓄电池充电站必须设置在指定的区域内。充电站必须备有用于冲洗和中和溢出电解液的设备、消防设施、防止车辆损坏充电装置的措施和驱散从蓄电池中所排出气体的适当通风设施。
在充电区域内禁止吸烟并用标牌警告。
只有经过培训和得到批准的人员才允许更换蓄电池或为蓄电池充电。蓄电池维修人员必须穿防护月艮。
所有的蓄电池更换工作必须按制造厂的说明书进行。在重新安装蓄电池时,必须采取措施使蓄电池正确连接、定位和固定。不得在无盖的蓄电池顶部放置工具和其他金属物品。
未得到专门的批准(例如指车辆制造厂),电动车辆不得换用不同电压、重量或尺寸的蓄电池。
必须采用制造厂规定的蓄电池。必须备有安全更换蓄电池的装置。使用起重设备起吊蓄电池时必须使用绝缘吊杆。
如采用环链葫芦,必须配备链条箱。如采用手拉葫芦,无盖的蓄电池必须用一层胶板或其他不导电材料加以覆盖,以防链条与蓄电池单格间的连接线或接线端子短路。
14.1.4.6 失效或损坏的车辆
如果发现机动工业车辆存在不安全因素,必须停止使用并撤离现场。经过维修恢复安全状态后,才可重新投入使用。
14.1.4.7 事故
一旦发生事故,例如人员伤害,车辆对建筑物或设备的损坏,首先要组织抢救,尽可能保护事故现场并立即向主管人员报告。
14.1.5 作业条件
14.1.5.1 通道和堆垛场地
作业场地的地面必须具有足够的承载能力,必须加强对其维修保养使其不影响车辆的安全作业。
车辆的运输通道必须具有良好的视野并容易转弯,不得出现斜坡、陡坡、窄通道和低顶篷。通道的轮廓或界线必须清晰。
在可能遇到步行式车辆的通道上,必须相应调整通道宽度。
建议通道的坡度不超过10%,坡顶和坡底必须平滑过渡,以免载荷振动或车辆底部与路面碰撞。
当坡度超过10%时,建议安装标牌。
如车辆在运行(运输)状态时载荷阻挡视线,则车辆运行时,载荷必须位于车辆运行方向的后方。
例外:在某些条件下(例如堆垛或爬坡),车辆运行时要求载荷位于车辆运行方向的前方,此时,必须极其小心驾驶车辆。必须注意:若作业条件要求,则应配备附属(辅助)设施或辅助人员。
通道、道路、过道、地板或坡道必须保持良好的作业状态,以防车辆或载荷的损坏,且不致降低车辆的稳定性。
危险状态,包括顶部的障碍危险,必须在显要位置标明。
消防通道、上楼通道和消防设备配置通道必须通畅。
14.1.5.2 跳板或过渡板
所有跳板或过渡板都必须具有足够的安全系数以承受有载车辆。在跳板或过渡板上必须明显而永久性地标明最大通过载荷。
跳板或过渡板必须固定牢靠,以防意外移动、振动或滑动。
在跳板或过渡板上必须备有提手或其他有效装置以便安全搬运,在可能情况下,应设置便于叉车搬运货物用的叉孔或吊耳。
跳板或过渡板应有防滑表面。
所有跳板或过渡板的两侧,必须装有防止车辆越过其边缘的装置。
当跳板或过渡板已固定位置时,必须采取措施以防跳板所搭接的车辆意外移动。
14.1.5.3 灯光
在作业区必须有足够照度的灯光。
作业区灯光照度低于321x时,车辆上必须备有辅助灯光。
14.1.5.4 车辆的起吊
吊索必须系在车辆制造厂指定的吊点上。
14.1.5.5 车辆的同步使用
同时使用两辆车搬运笨重或沉重的载荷是一项需要特别小心的危险作业,这种情况必须作为特殊情况处理并在负责搬运作业人员监督下进行。
14.1.5.6 电梯(升降机)
运送工业车辆的电梯(升降机)必须能承受车辆、载荷和驾驶员的全部重量。这类电梯(升降机)必须是指定的,驾驶员只能使用指定的电梯(升降机)。
14.1.5.7 在公路车辆(拖车)和铁路车辆上作业
机动工业车辆驶上公路车辆之前,公路车辆必须制动和加楔块以防移动。
例外:具有自动弹簧锁式停车制动器的公路车辆可以不使用楔块。
机动工业车辆进出未与牵引车连接的半挂车时,为防止半挂车跷头,可使用支撑。
必须建立作业通讯和作业顺序,以防装卸载荷时铁路车辆意外移动。
公路车辆和铁路车辆必须能承受工业车辆、载荷和驾驶员的全部重量。必须检查铺板是否破碎、有孔洞或其他损坏。
工业车辆在高台或平台上作业时,不得用工业车辆来移动其他车辆。不得用工业车辆来开关铁路车辆的门,除非装有专门的装置且驾驶员也受过如何使用此装置的训练。
14.2 适用于驾驶员
机动工业车辆的安全作业在很大程度上取决于驾驶员对车辆的操纵方式。适用于驾驶员的安全规则有以下几个主要方面:
a)一般规则;
b)搬运载荷(起升和堆垛)规则;
c)运行(驾驶)规则;
d)驾驶员维护车辆规则。
不遵守这些规则可能会导致:
a)伤害驾驶员或其他人员的严重危险;
b)损坏物料。
14.2.1 一般规则
只有经过培训并通过考核取得操作证的人员,才允许驾驶机动工业车辆。
机动工业车辆不得载客,除非其上专门配备了可供乘客乘坐的设施(见14.1.3)。
驾驶员必须特别注意作业环境,包括在附近的其他人员以及固定的或移动的物体,且必须随时提防行人。
无论车辆起升部件有无载荷,必须禁止任何人通过或站在车辆起升部件下面。
发生人员、建筑物、结构或设备事故必须立即向有关人员汇报。
驾驶员未经批准不得修改、增加或拆除车辆零件以免影响车辆性能。除了已由车辆制造厂装上的以外,不得在车辆方向盘上附加或安装手把。
驾驶员必须在车辆的使用范围内使用车辆。
用乘驾式高起升车辆进行高堆垛作业、搬运高的或多件叠装的单元货物时,必须使用带有护顶架和挡货架的车辆。
例外:如果不存在载荷或货物落到驾驶员身上的危险,那么可以使用不带护顶架的乘驾式高起升车辆。
用步行式车辆进行高堆垛作业、搬运高的或多件叠装的单元货物时,必须使用挡货架。
14.2.2 载荷搬运(起升或堆垛)规则
14.2.2.1 载荷
工业车辆或工业车辆与属具的联合体(当装有属具时)只允许搬运不大于其额定起重量的载荷。装有属具的工业车辆的起重量可能小于属具标牌上标出的能力(见5.1.3)。
不得采用任何方式来增大车辆的起重量,例如附加人员或平衡重。
在任何时候,特别是在使用属具时,必须注意载荷的操作、定位、固定与运输,装有属具的车辆在无载时,应作为部分承载来使用;
只允许搬运排列稳定或安全的载荷,尤其在搬运超长或超高载荷时必须格外小心。
在搬运重心不能确定的载荷时,操纵车辆时必须特别小心。
14.2.2.2 载荷的拣取和放下
采用货叉拣取载荷时:
a)货叉间距必须适合被搬运载荷的宽度。
b)货叉必须尽可能深地插入到载荷的下方。但注意不得使叉尖碰到载荷以外的物件。然后货叉必须起升到足够的高度以拣取载荷。
c)在搬运高的或多件叠装的单元货物时,必须采用最小的后倾(如可后倾)来稳定载荷,并应特别小心。
在放下载荷时,必须小心地下降。如有可能可少许(或有限地)前倾门架,以便放妥载荷和抽出货叉。
14.2.2.3 堆垛
堆垛时门架必须尽量后倾以保证载荷稳定,慢慢地接近货堆。
车辆靠近和面对货垛时,必须把门架调整到近似于垂直位置,把载荷起升到稍高于堆垛高度,然后车辆向前移动;或者前移式叉车伸出货叉,降下货叉放下载荷。
在起升装置已起升时开动车辆,不论车辆空载或满载,都应十分小心、平稳地操纵制动器。
必须确保载荷堆垛牢靠。
堆垛后抽出货叉,并把货叉降低到运行高度,在确认道路无障碍后开走车辆。
具有后倾的车辆运行时必须利用后倾以稳定载荷。
14.2.2.4 拆垛
车辆慢慢靠近货堆,当货叉叉尖离货堆约0.3m时停下。
货叉间距必须调整到适合于要搬运载荷的宽度,而且必须检查载荷的重量,以确保载荷在车辆的起重量范围之内。
必须垂直起升货叉到可将其插入到载荷下方的位置。
在起升装置已起升时开动车辆,不论空载或满载,都必须十分小心、平稳地操纵制动器。
货叉必须尽可能深地插入到载荷的下方,但注意不得使叉尖碰到载荷以外的物件。然后货叉必须起升到足够高度以拣取载荷。
进一步起升货叉,使载荷正好与货堆脱离。如果门架可后倾,那么货叉必须适当后倾以稳定载荷。若是前移式叉车,则必须缩回货叉。
在确认道路通畅后,将载荷从货堆上取下。
载荷必须降低到运行高度,门架最大后倾。当确认道路通畅之后,车辆平稳地离开。
14.2.3 运行(驾驶)规则
14.2.3.1 一般规则
驾驶员必须沿通道的右侧驾驶车辆,驾驶员必须能清楚地看到运行的道路,并注意其他车辆、行人及安全间距。
驾驶员必须遵守一切交通规则,包括厂内规定的车速限制。
必须与前面运行的车辆保持一定的安全距离。
驾驶员必须时刻以认真负责的态度驾驶车辆。禁止突然起步、停车及高速转弯。除作业状况要求外,建议在车辆起步时方向盘不应处于极限位置。如果需在极限位置起步,则应小心操作。
在车辆运行时载荷或承载装置必须保持在运行高度,若有可能,车辆运行时应后倾载荷。除了堆垛作业外,不得起升载荷。此规定不适用于专门设计的可带看起升载荷运行的车辆。
在运行(即运输)状态时,如果载荷有碍视线,那么当车辆运行时,载荷必须位于车辆运行方向的后方。
例外:在某些情况(如堆垛或爬坡)下,车辆运行时要求载荷位于车辆运行方向的前方,此时,驾驶员必须十分小心地驾驶车辆。作业条件要求时,可采用某种附属(附助)设施或由其他人员引导。
在十字路口和其他视线受阻的场合,必须降低车速,并发出声响信号。
车辆带着起升载荷进行机动运行时,必须缓慢而平稳地操纵转向装置和制动器。
在交叉路口、视线受阻的地段或危险场合,不得超越同向运行的其他车辆。
驾驶员必须避免车辆驶过松软物体,以免导致物品损坏或人员伤害。
不得将手臂、腿或头放在门架立柱或车辆的其他运动部件之间。
车辆运行时,驾驶员不得将身体探出车体的外轮廓线。
转弯时,如果附近有其他车辆或行人则必须发出警示信号。
必须遵守有关地面承载能力的所有标牌和其他指示牌的要求。
必须特别注意通向电梯(升降机)的斜坡和通道的承载能力。
14.2.3.2 车速
车速必须和车辆行驶区域内的人员活动情况、能见度、道路或地面情况以及载荷情况相适应。车辆在湿滑的路面上运行时必须特别小心。
在任何情况下,都必须将车速控制在可安全停车的范围内。
14.2.3.3 在坡道上运行
在坡道上运行时,必须遵守下列规则:
a)车辆必须缓慢地上、下坡。
b)除侧面装载和无起升车辆外,无载车辆运行时,最好将其承载装置面向下坡方向。
c)车辆不得在坡面上转弯,也不得横跨坡道运行。
d)车辆靠近坡道、高站台或平台边缘时,驾驶员必须小心驾驶车辆,车辆与站台或平台边缘之间必须保持至少为车辆一个轮胎宽度的距离。
e)当上坡或下坡坡度超过10%时,如有可能,有载起升车辆和平台堆垛车(侧面承载叉车、越野叉车、跨车和平台搬运车除外)运行时必须使载荷面向上坡方向。
f)车辆在各种坡道上作业时,必须把载荷和承载装置向后倾(如有可能)且只升高到足以通过道路表面和局部障碍物的高度。
14.2.3.4 通过间隙
必须确保在悬挂装置(如:灯具、管道和消防系统)下,有足够的净空高度。
通过通道和门口之前,必须确保车辆、驾驶员和载荷有足够的通过间隙。
14.2.3.5 在公路车辆和铁路车辆上作业
在机动工业车辆驶上(或驶下)公路车辆或铁路车辆前,必须采取必要措施防止公路车辆或铁路车辆移动。
在机动工业车辆驶上(或驶下)一辆未与牵引车连接的半挂车之前,必须确保防止半挂车跷头的支撑件(如果要求)处于支撑位置。
在机动工业车辆驶上公路车辆或铁路车辆之前,必须保证车辆的地板能承受工业车辆、载荷和驾驶员的全部重量。此外,必须检查铺板是否破碎、有孔洞或其他损坏。
工业车辆在高台或平台上作业时,不得用工业车辆来移动其他车辆。不得用工业车辆开关铁路车辆的门。除非装有专门装置且驾驶员也受过如何使用此装置的训练。
如有可能,车辆必须斜线穿过铁路轨道。
14.2.3.6 车辆在跳板或过渡板上运行
机动工业车辆驶过跳板或过渡板前,必须确保该板固定牢靠。
车辆的总重不得超过跳板或过渡板的额定载重量。
在通过跳板或过渡板时,必须小心并缓慢地驾驶车辆。
14.2.3.7 车辆在电梯(升降机)中使用
在机动工业车辆驶入电梯(升降机)之前,必须确保电梯(升降机)能承受车辆、载荷和驾驶员的全部重量。
在允许车辆驶入或驶出电梯(升降机)之前,建议所有其他人员离开电梯(升降机)。
在电梯(升降机)的轿厢地板与地面子齐之后,车辆必须对正方向慢慢地驶入。
必须使载荷而不是驾驶员先进人电梯(升降机),这特别适用于步行式车辆。
车辆驶入电梯(升降机)后,必须把车辆的控制装置置于中间位置,动力关闭,停车制动器拉紧。
14.2.3.8 停车
驾驶员离开时,承载装置必须降到最低位,控制装置置于中间位置,动力关闭,停车制动器拉紧,车辆停稳以防意外运动或未经批准被他人擅自开动。
车辆停放时,防火通道、通向楼梯及消防设备的通道必须通畅。
车辆的停放位置必须与铁道保持一段安全距离。
14.2.4 驾驶员维护车辆规则
14.2.4.1 一般规则
使用车辆之前,必须检查车辆的技术状况。依据车辆的型式不同,必须特别注意一些特殊部位[如:燃油系统、警示装置、动力系统、制动器、转向机构、灯光、车轮以及充气胎气压(即充气式)和起升系统(包括起升链条、钢丝绳、限位开关和液压缸)]。
如发




